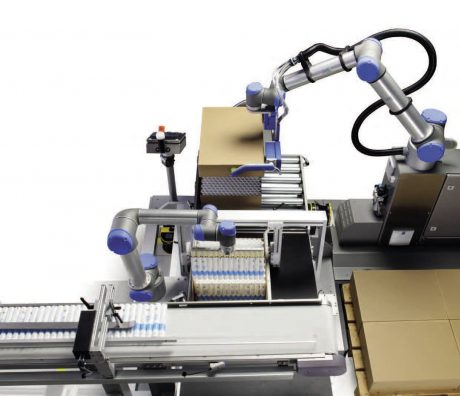
Коллаборативные роботы (коботы) — это сложные машины, которые работают рука об руку с человеком. В процессе совместной работы они поддерживают и облегчают функции оператора.
Коллаборативные роботы преобразовали промышленный мир. Кобот и оператор могут работать в одном и том же пространстве без защитного барьера. Такое сосуществование стало возможным благодаря тому, что совместные роботы оснащены сложными механизмами безопасности, основанными на контроле силы и постоянном мониторинге того, что происходит вокруг них. Действительно, благодаря ощущению осязания, камерам и специальным системам противодействия столкновениям, они координируют свои движения с движениями человека, контролируя возникновение несчастных случаев.
Среди преимуществ коллаборативных роботов нужно отметить низкие затраты на установку и запуск. Режим обучения коботов упрощает их установку и программирование. Они более гибкие, чем другие роботы, их можно перемещать с одной станции на другую и легко перепрограммировать.
Их основными недостатками являются их низкая полезная нагрузка и их скорость работы, которая ниже, чем у других роботов.
Сегодня коллаборативные роботы находят широкое применение в промышленном производстве, особенно в автомобильном секторе, в мониторинге, погрузке/разгрузке и в медицинской области, особенно в хирургии.