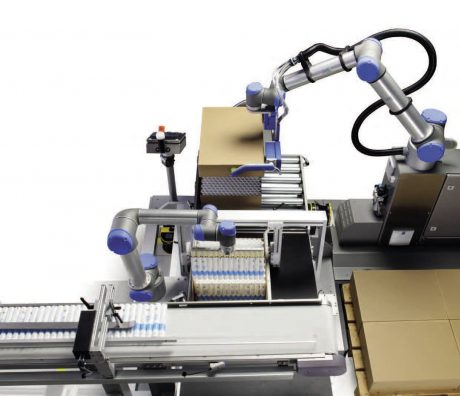
Entre os desenvolvimentos mais recentes na área da robótica, o aparecimento dos robôs colaborativos, ou cobots, revolucionou o mundo da indústria.
São máquinas complexas que trabalham lado a lado com os humanos. Num processo de partilha de tarefas, facilitam o trabalho do operador humano.
Os robôs colaborativos são robôs capazes de interagir com o meio que os rodeia. O cobot e o operador podem partilhar o mesmo espaço de trabalho, sem necessidade de barreiras de segurança. Esta coabitação tornou-se possível pois os robôs colaborativos estão equipados com sofisticados mecanismos de segurança baseados no controlo da força e na vigilância constante do que se passa em seu redor. Na verdade, sendo dotados de sensores de tato, de câmaras e de sistemas anticolisão especiais, estes robôs coordenam os seus movimentos com os dos trabalhadores humanos, procurando evitar acidentes.
Das diferentes vantagens apresentadas pelos robôs colaborativos, destaca-se o baixo custo de integração e de entrada em funcionamento. Graças ao seu modo de aprendizagem, os cobots são fáceis de operar e de programar. São mais versáteis do que os outros robôs: podem ser transferidos de um posto de trabalho para outro e, como se referiu, são fáceis de reprogramar.
As suas principais desvantagens prendem-se com a baixa capacidade de carga útil e uma velocidade de trabalho inferior à de outros tipos de robôs.
Hoje em dia, os robôs colaborativos são amplamente utilizados na produção industrial, em particular no setor automóvel, para inspeção e movimentação, bem como na área da medicina, especialmente em cirurgia.