ロータリエンコーダは、動作制御のための角度位置に関する情報を取得するための装置です。収集される情報は、角速度、位置、変位、方向または加速度についてです。


ロータリエンコーダは、動作制御のための角度位置に関する情報を取得するための装置です。収集される情報は、角速度、位置、変位、方向または加速度についてです。
ロータリエンコーダを選ぶには、インクリメンタル形またアブソリュート形のどちらが必要かを決定します。
• インクリメンタル形ロータリエンコーダは、軸の回転に応じてパルスを供給します。パルスまたはインクリメントは、デジタル方形波です。 エンコーダの分解能は1回転させた場合に出力されるパルス数です。ロータリーエンコーダには、電源をオンにしたときに位置情報が含まれていないため、電源断時にはリセットする必要があります。
• アブソリュート形ロータリエンコーダは、電源断時も位置を記憶しています。インクリメンタル形ロータリエンコーダは最も経済的ですが、次の場合はアブソリュート形ロータリエンコーダを選択する必要があります:
•ロータリーエンコーダをリセットすることで障害が発生する場合。
•誤ったパルスを生成する可能性のあるノイズによって信号処理システムが妨害される場合。
•例えば高周波数で、カウントしていないパルスのリスクが重要な場合。
•回転運動は振動型であり、完全な回転に対応していない場合。
•常に軸の実際の位置を知る必要がある場合。
•完了した周回数を記載する必要がある場合。
これらの場合、アブソリュート形マルチターンロータリエンコーダを選択する必要があります。 ロータリーエンコーダの選定には、ロータリエンコーダを組み込むシステムに応じて寸法を決定する必要があります。 つまり、ハウジングの直径、長さ、出力軸の直径(ソリッドシャフトまたは中空軸)などのサイズを選択します。
最後に、適切な保護レベルを選択するためにコーダーが置かれる環境および機械的制約を特定することが必要です。
インクリメンタル形ロータリエンコーダは、基準位置に対する角度変位を測定します。 電源断時の後、データ処理システムは角変位に関連する情報を正しく利用できるようにするために、エンコーダが基準位置に対応する情報を送信するまで待たなければなりません。インクリメンタル形ロータリエンコーダは、長所と短所がある様々な技術から設計されています。 最もよく使われる技術は次の通りです:
• 光学インクリメンタル形ロータリエンコーダ : これらのエンコーダは、発光ダイオード(LED)を使って角変位を読み取ります。 これらのロータリーエンコーダは経済的で、高分解能(高精度)です。 この技術は産業界で広く使用されていますが、環境によって汚れ(ほこり、油など)が発生すると、光学読み取りシステムに支障が起こる可能性があります。
• 磁気インクリメンタル形ロータリエンコーダ : パルスは磁石によって放射されます。 磁気コーダは機能の低下をしずらいため、産業界で非常に活躍しています。
ロータリエンコーダの動作原理がどのようなものであっても、出力信号は二値化を構成する一連のパルス、 つまりエンコーダーの解像度による角変位に対応する1と0の連続です。 この信号を使用して移動方向や基準位置に対する速度、または加速度を決定することができます。
インクリメンタル形エンコーダを使用すると、エンコーダのワイヤ-を自動装置の入力口に接続できます。 使用する入力口は、エンコーダの動作周波数によって決まります。 この周波数は、軸の回転速度とエンコーダの分解能に比例します。 周波数が高い場合、基準位置に対応する信号はパルスの非計数誤差の補正ができます。
原則としてロータリーエンコーダには、5〜12の出力(コネクタのワイヤまたは端子)が装備されていますが、これはメ-タ-に接続する必要があります。 出力が5つあるエンコーダの場合、電源には2本のワイヤが使用され、角度変位に対応する信号を送信するために3本のワイヤが使用されます。
アブソリュート形ロータリーエンコーダは、オンになるとすぐに角度位置を示します。 そして連結されている軸の実際の位置に対応する信号を連続的に送信します。 2種類のアブソリュート形ロータリーエンコーダがあります:
• シングルターンロータリエンコーダー は、軸の位置を示します。 エンコーダによって送信される値は、各回転値と同じです。 アブソリュートシングルターンエンコーダは、角度変位に関連する情報に加えて、軸の位置(停止している場合でも)をいつでも知ることができます。
• マルチターンロータリエンコーダー は、軸の位置に加えて回転数を表示するための二次ロータリエンコーダを組み込んでいます。インクリメンタル形ロータリエンコーダと同様に、主にアブソリュート形ロータリエンコーダに使用される技術は、光学式エンコーダや磁気エンコーダで高い精度を提供しますが、汚れの影響を受けやすいです。
アブソリュート形ロータリーエンコーダの場合、軸の位置はエンコーダがオンになったときに送信される一意のコードによって定義されます。 SSI、CANopen、Profinetなどのフィールドバスを介して、デジタル信号としてそのまま使用することも、変換して伝送することもできます。
ロータリーエンコーダの分解能は、1回転で測定できる最大ポイント数に対応しています。 インクリメンタル形エンコーダの場合、分解能は1回転あたりのパルス数 に直接関係します。 アブソリュート形エンコーダでは、エンコードが実行されるビット数に関連しています。 例えば16ビットのエンコーダの解像度は1回転あたり65536ポイントになります。
エンコーダの分解能の選択は、用途を満たすことが期待される分解能と、測定チェーンを構成する機械部品の精度に基づいています。 エンコーダは、注意しなければいけない最大入力周波数に耐えられる電子デバイス、コントローラ、またはカウンタに接続されています。 高分解能インクリメンタル形エンコーダは、低解像度のインクリメンタル形エンコーダよりも1回転でのパルス数が多いです。 用途別に課せられる回転速度に応じて、エンコーダの出力信号はエンコーダに接続された装置がサポートできる周波数よりも高い周波数を有することがあります。 この場合は、より低い解像度のロータリエンコーダに切り替える必要があります。
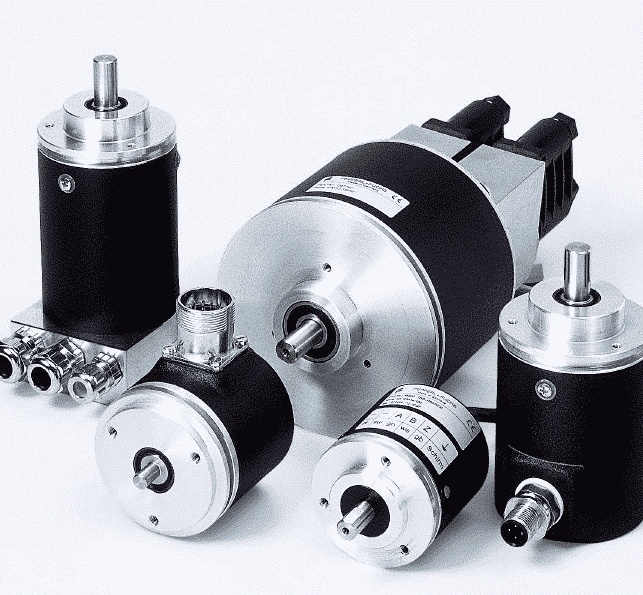
ロータリエンコーダの取り付け方は、その形状により異なります。 そのためロータリエンコーダを測定軸にどのように接続するかを決定することが重要です。主な取り付け方法は3つあります :
• ロータリーエンコーダは、円錐形、四角形、六角形などの異なる形状を持つことができるソリッドシャフトを備えています。 このエンコーダは中空軸の端部やピニオンギヤなどに取り付けることができます。
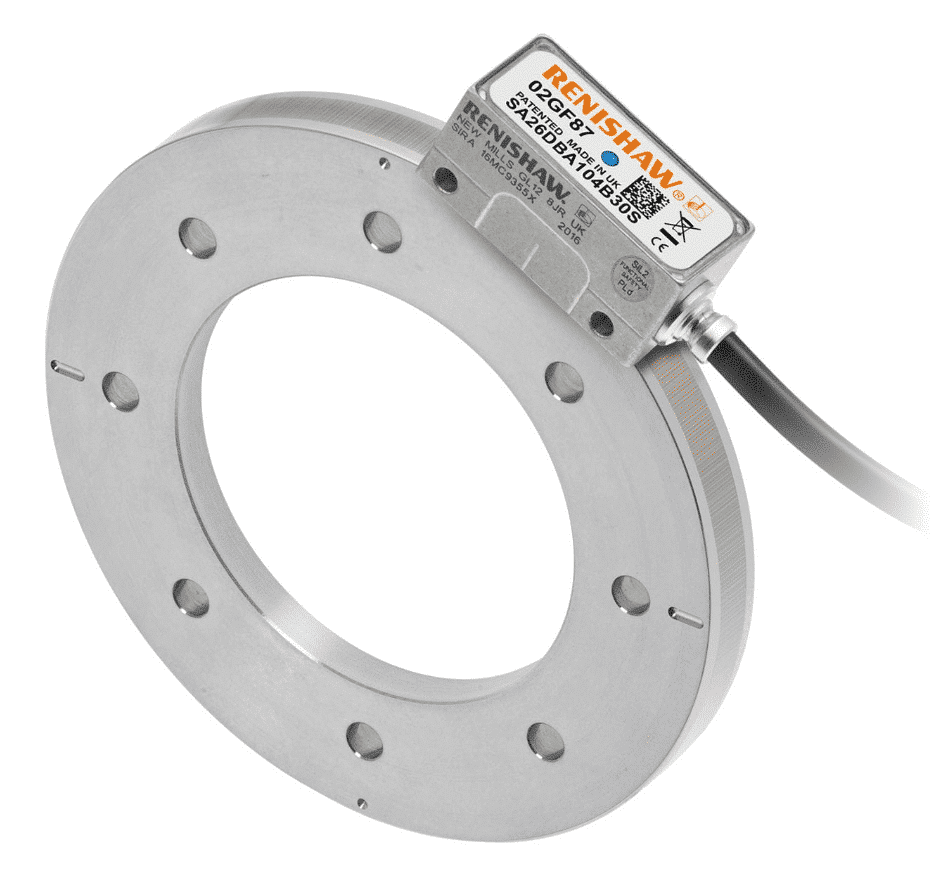
• 軸が挿入できる中空出力を備えたロータリエンコーダ。• ロータリーエンコーダは2つの部分に分かれており、 軸の先端に取り付けられるディスクと、ディスク上に固定される「読み取りヘッド」が含まれています。

 (1 votes, average: 1.00 out of 5)
(1 votes, average: 1.00 out of 5)
