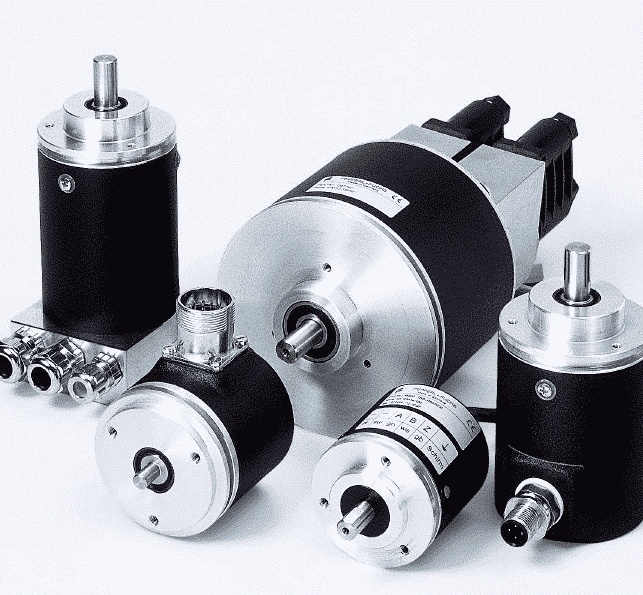
Датчик угла поворота представляет собой устройство, позволяющее получать информацию, относящуюся к угловому положению, для приложений по управлению движениями. Собранная информация касается угловой скорости, положения, смещения, направления или ускорения.
Чтобы выбрать датчик угла поворота, вам сначала необходимо определить, следует ли использовать инкрементальный или абсолютный энкодер.
• Инкрементальный датчик угла поворота выдает импульсы в соответствии с вращением оси. Импульс, или инкремент, представляет собой квадратный цифровой сигнал. Разрешение энкодера соответствует количеству его инкрементов за оборот. Он не содержат никакой информации о местоположении при включении питания. Он должен быть сброшен при каждом сбое питания.
• Абсолютный датчик угла поворота имеет свой собственный счетчик в том смысле, что он сохраняет последнее значение, записанное во время сбоя питания.
Инкрементальный энкодер является наиболее экономичным, однако, выбор абсолютного энкодера неизбежен, если:
• сброс счетчика энкодера не позволяет вам выполнять задачи, исходя из требуемых целей ;
• работа вашей системы обработки сигналов может быть нарушена паразитами, которые могут исходить от ложных импульсов;
• присутствует высокий риск, связанный с недосчетом импульсов (например, на высоких частотах);
• вращательное движение имеет колебательный характер и не соответствует полному вращению ;
• важно всегда знать фактическое положение оси;
• необходимо подсчитать количество завершенных оборотов.
В этом случае вам нужно будет выбрать абсолютный многооборотный энкодер.
Чтобы выбрать датчик угла поворота, вам также необходимо будет определить его размеры в соответствии с системой, в которую он будет интегрирован. Таким образом, вы можете выбрать его размер, то есть диаметр корпуса, длину, а также диаметр выходного вала (сплошной вал или полый вал).
Наконец, необходимо будет определить ограничения, связанные с окружением, и механические ограничения, с которыми столкнется энкодер, чтобы выбрать соответствующую степень защиты.
Как работает инкрементальный датчик угла поворота?
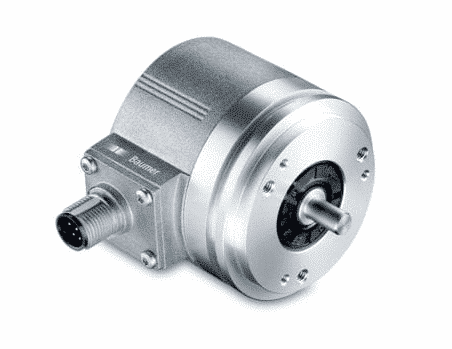
Датчик угла поворота марки Baumer
Инкрементальный энкодер измеряет угловое перемещение относительно опорной позиции. После сбоя питания система обработки данных должна дождаться, пока энкодер отправит информацию, соответствующую изначальной позиции, чтобы иметь возможность правильно использовать информацию, связанную с угловым смещением.
Инкрементальные энкодеры разработаны с использованием различных технологий, каждая из которых имеет свои преимущества и недостатки. Наиболее используемые технологии :
• Оптические инкрементальные энкодеры: эти энкодеры используют светодиоды (LED) для считывания углового перемещения. Эти энкодеры являются экономичными и обеспечивают высокое разрешение (высокая точность). Эта технология широко используется в промышленности, тем не менее, функционирование оптической системы считывания может быть нарушено, если окружающая среда представляет опасность загрязнения (пыль, масло и т. д.).
• Магнитные инкрементальные энкодеры: импульсы испускаются магнитами. Эта технология также широко распространена в промышленности, потому что магнитные энкодеры менее подвержены риску загрязнения.
Независимо от принципа работы энкодера, выходной сигнал представляет собой последовательность импульсов, которая представляет собой двоичное кодирование, то есть последовательность 1 и 0, которая соответствует угловому смещению, в зависимости от разрешения энкодера. Этот сигнал может быть использован для определения направления движения, величины смещения относительно изначальной позиции, скорости или ускорения.
В случае инкрементальных энкодеров вы можете подключить провода энкодера к входам автомата. Входы, которые будут использоваться, определяются рабочей частотой энкодера. Эта частота пропорциональна скорости вращения оси и разрешению энкодера. В случае повышенной частоты сигнал, соответствующий изначальной позиции, позволяет исправить ошибки в подсчетах некоторых импульсов.
Как правило, датчик угла поворота оснащен 5-12 выходами (проводами или клеммами разъема), которые должны быть подключены к счетчику. В случае энкодера с 5 выходами два провода используются для электропитания, а три других — для отправки сигналов, соответствующих угловому смещению.
Как работает абсолютный датчик угла поворота?
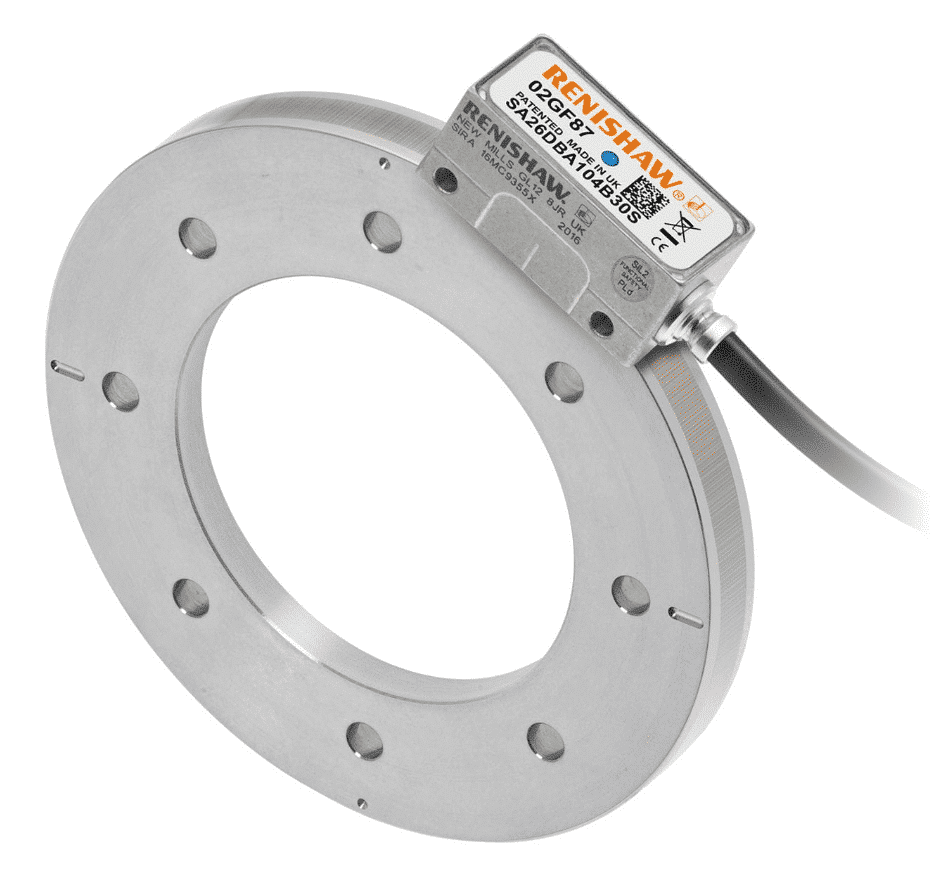
Датчик угла поворота марки Renishaw
Абсолютный энкодер указывает угловое положение при включении. Он непрерывно подает сигнал, соответствующий фактическому положению оси, к которой он подключен. Существует два типа абсолютных энкодеров:
• Однооборотный абсолютный датчик угла поворота , который указывает положение оси. Значение, отправленное энкодером, идентично каждому вращению. Абсолютный однооборотный энкодер позволяет в любое время определить положение оси (даже при остановке) в дополнение к информации, связанной с угловым смещением.
• Многоборотный абсолютный датчик угла поворота включает в себя дополнительные энкодеры, позволяющие указывать количество выполненных оборотов в дополнение к положению оси.
Как и в инкрементальных поворотных энкодерах, технологии, используемые, главным образом, для абсолютных датчиков угла поворота, представляют собой оптические датчики, которые обеспечивают высокую точность, но могут быть восприимчивы к загрязнению и магнитным энкодерам.
При использовании абсолютного энкодера положение оси определяется индивидуальным кодом, который отправляется при включении энкодера. Он может использоваться как таковой или в преобразованной форме для передачи в виде цифрового сигнала через шину, такую как SSI, CANopen или Profinet.
Что такое разрешение энкодера?
Разрешение датчика вращения соответствует максимальному количеству точек, которое он может измерить за один оборот. В случае инкрементального энкодера, разрешение напрямую зависит от количества импульсов, которое он выдает за оборот. В случае абсолютного энкодера, это связано с количеством бит, через которые выполняется кодирование. Например, 16-битный энкодер будет иметь разрешение 65,536 точек на оборот.
Разрешение энкодера выбирается в соответствии с предполагаемым разрешением, которое должно соответствовать области применения и точности механических компонентов измерительной цепи. Датчик подключается к электронному устройству, контроллеру или счетчику, который допускает максимальную входную частоту, на которую следует обращать внимание. Действительно, инкрементальный энкодер с высоким разрешением генерирует большее количество импульсов за оборот, чем инкрементальный энкодер с низким разрешением. В зависимости от частоты вращения, заданной приложением, выходной сигнал энкодера может иметь более высокую частоту, чем та, которую способно выдержать устройство, подключенное к энкодеру. В этом случае вам потребуется использовать энкодер с меньшим разрешением.
Как установить датчик угла поворота?
Установка датчика угла поворота зависит от его формы. Вот почему важно определить, как датчик угла поворота может быть подключен к измеряемой оси.
Существует три типа установки:
• Датчик угла поворота со сплошным валом, который может иметь различные формы, такие как усеченный цилиндр, квадрат или шестиугольник. Этот энкодер может быть установлен на конце полого вала или, например, на шестерне.
• Датчик угла поворота с полым валом, в который может быть вставлена ось.
• Датчик угла поворота из двух частей. Он включает в себя диск, который монтируется в конце оси и «считывающую головку», которая будет закреплена над диском.